

















MEET THE KEYNOTE: VERONICA J. SANTOS
Veronica J. Santos is an Associate Professor in the Mechanical and Aerospace Engineering Department at the University of California, Los Angeles, and Director of the UCLA Biomechatronics Lab. Dr. Santos received her B.S. in mechanical engineering with a music minor from the University of California at Berkeley (1999), was a Quality and R&D Engineer at Guidant Corporation, and received her M.S. and Ph.D. in mechanical engineering with a biometry minor from Cornell University (2007). While a postdoc at the University of Southern California, she helped to develop a biomimetic tactile sensor for prosthetic hands. From 2008 to 2014, Dr. Santos was an Assistant Professor in the Mechanical and Aerospace Engineering Program at Arizona State University. Her research interests include hand biomechanics, tactile sensors, prosthetics, and robotics for grasp and manipulation. Dr. Santos was selected for an NSF CAREER Award (2010), two ASU Engineering Top 5% Teaching Awards (2012, 2013), an ASU Young Investigator Award (2014), and as an NAE Frontiers of Engineering Education Symposium participant (2010).

Keynote Talk
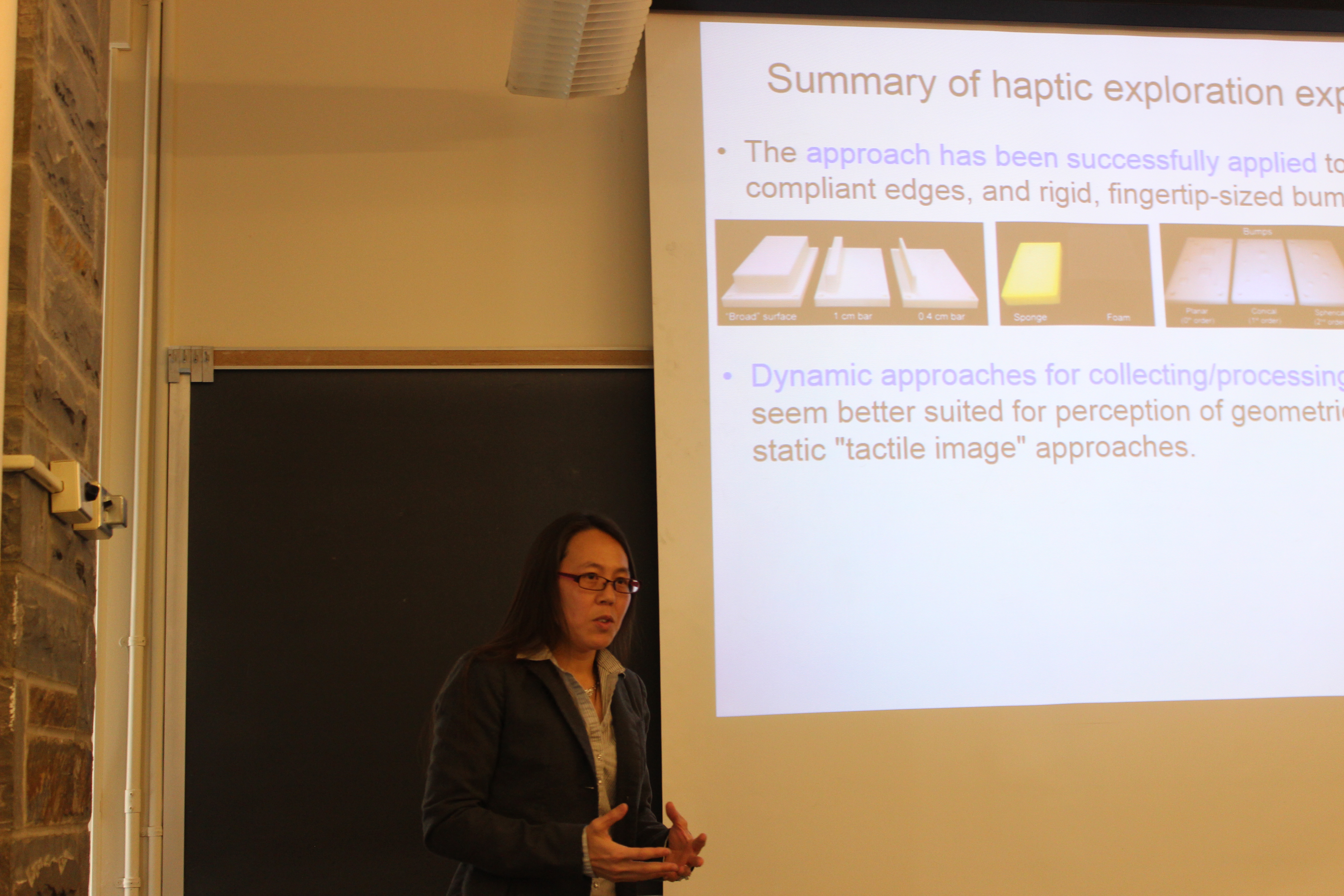
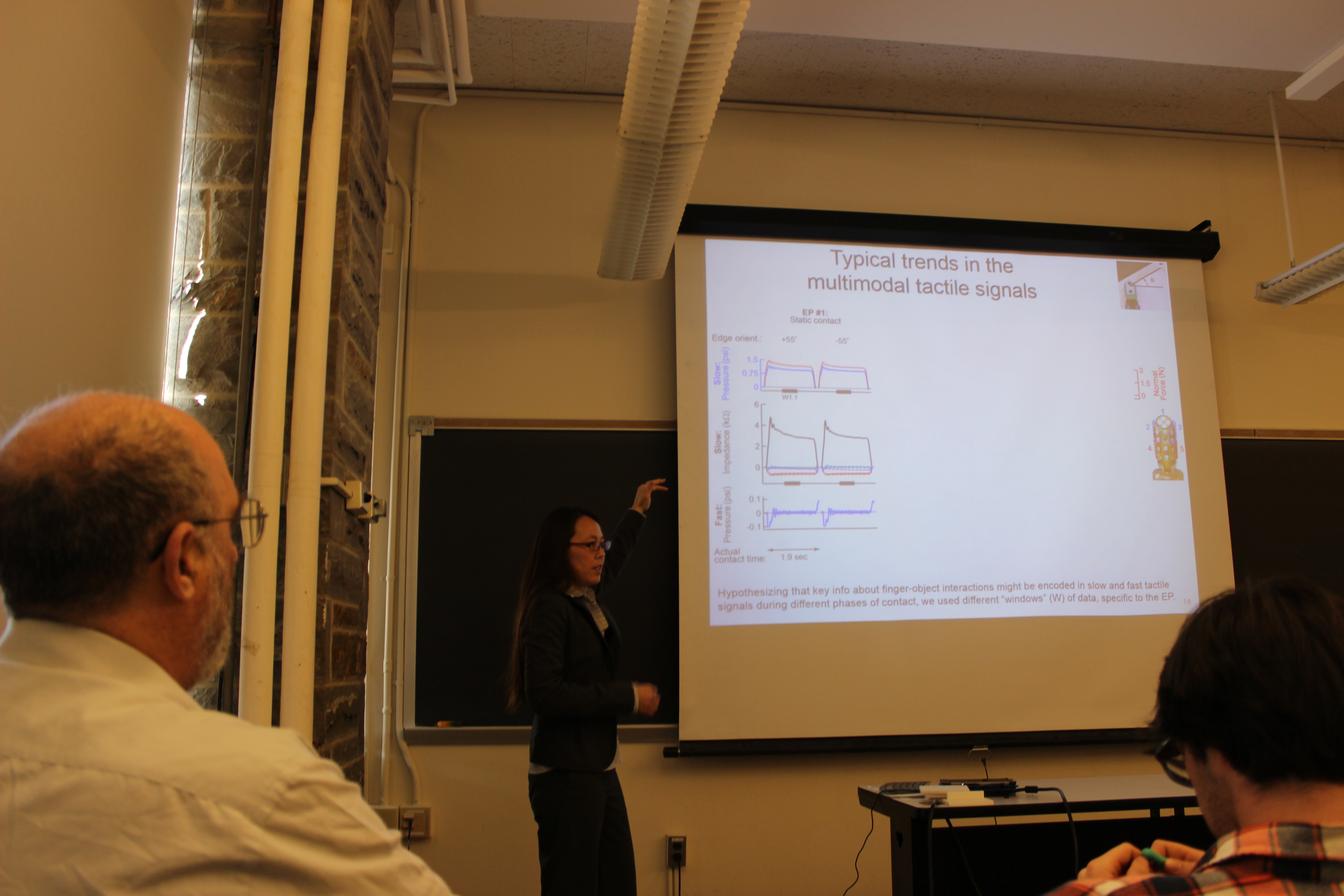
Haptic perception remains a grand challenge for artificial hands. Artificial dexterous manipulators could be enhanced by “haptic intelligence” that enables identification of objects and their features via touch alone. This could be especially useful when reliable visual and/or proprioceptive feedback are unavailable. Studies will be presented in which a robot hand outfitted with a deformable, multimodal tactile sensor was used to replay human-inspired haptic “exploratory procedures” to perceive salient geometric features such as edges and fingertip-sized bumps and pits. Tactile signals generated by active fingertip motions were used to extract inputs for support vector classification and regression. The influence of tactile sensor capabilities, exploratory procedure selection, and hand compliance on perception accuracy will be discussed. The ability to perceive local shape could be used to advance semi-autonomous robot systems and to provide haptic feedback to human teleoperators of devices ranging from bomb defusal robots to neuroprostheses.