Improving Robot on Human Interactions using Differential Game Theory
In recent years, there has been a continual increase of humans coming into contact and having to work alongside robots. Up to now, these relationships often sacrifice a lot of untapped potential in terms of efficiency and effectiveness since robots lack a systematic methodology to producing versatile behaviors when physically interacting with humans. This article presents the concept of an interactive robot controller able to understand the control strategy of the human user and react optimally to their movements. Dr. Yanan Li proposes by enabling the robot to identify human users’ behavior through exploiting game theory, their team has developed a system where robots can work along with humans to complete joint tasks. This has huge implications since right now, most robots either ignore the human operator control (in co-activity) or blindly follow it (in master–slave control) which are successful only for a handful of specific applications. This controller, on the other hand, is a sophisticated interaction strategy and promises a more versatile and flexible interaction optimally combining the two partners’ capabilities
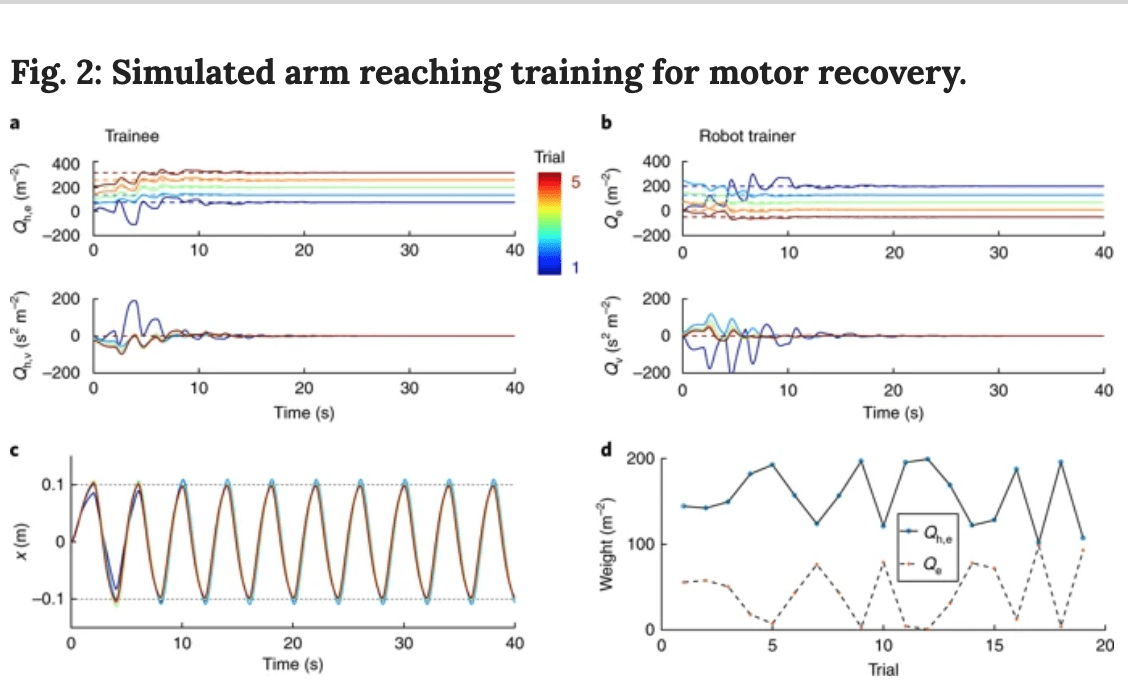
The calculations to find a Nash Equilibrium presented in the article is far beyond the scope of this course and what we have seen in the lecture. This is because the conflict is being modeled and analyzed in the context of a dynamical system. More specifically, there is a notion of state, with variables evolving over time according to a differential equation. At a high abstract level, the robot’s control input estimates the human’s cost function and in turn, the reactive robotic programming system enables a robot to continuously learn the human user’s control and adapt its own control correspondingly. Applications could include physical therapy for example, where a patient isn’t strong enough to perform a certain motion and the right guidance with a robot can help strengthen mobility and improve motor recovery. As the patient gains strength, the robot dynamically changes how much it assists.
Source: https://www.nature.com/articles/s42256-018-0010-3 and http://www.sussex.ac.uk/broadcast/read/47199